|
| |
|
【来源:日经BP社技术在线】
【作者:小川 计介】
|
爱信精机在2006年4月3日~6日举办的“2006年美国汽车工程学会年会暨展览会(SAE2006)”上,展出了正在开发的新一代停车辅助系统。具有利用装配在车身前后和侧面的摄像头、检测障碍物和行人,在撞车之前自动刹车的功能。同时既提高了对司机的帮助,又提高了行车的安全性。
与现有“普锐斯”采用的停车辅助系统“IPA(智能停车辅助系统)”的主要区别,一是倒车时和正在驾驶一样可使用发动机的驱动力,二是倒车时无需一直踩刹车踏板。现有IPA除在倒车时要使用自动变速箱的蠕变力外,还需要司机一直踩着刹车踏板,调整车辆倒车速度。而新一代系统不仅要像过去一样辅助转向操作和和车辆后移,还要提供包括车辆前移在内的驾车支援。
另外还强化了摄影头的图像处理功能。通过对车辆周围进行监视,自动计算停车位置,当接近车辆倒车起始位置时,即使还在踩着油门踏板,车辆也会在发出通知的同时自动停车。松开油门踏板后,只要再次踩下并松开刹车踏板,车辆就会前进到指定位置,此时自动刹车就会再次作用使车辆停下来。
紧接着,根据发出的通知,将换档杆换到R(倒车)档后,就会自动倒车。倒车时无需像现在一样一直踩着刹车踏板。假如车辆行进方向上有行人等,就会自动停车。此时一旦踩下并松开刹车,辅助系统就会再次起作用,确认没有障碍物之后,就会在目标位置停下来。
此次展示的新一代产品“仍处于开发阶段,完全是一种概念。能否直接投入实用尚不清楚。由于爱信精机主要负责图像处理部分的开发,因此是使用蠕变力还是发动机的驱动力等车辆控制部分则将由汽车公司决定”(现场工作人员)。
|
| 图2:概念车的仪表盘 |
|
| 图3:在画面上可从平行停车(上)和常见的后退停车(下)中选择停车方式 |
|
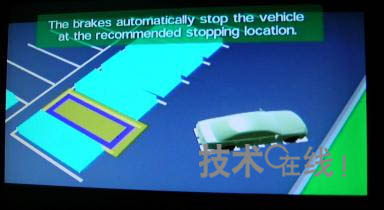
| 图4:常用停车方法的演示。(从画面下方开始车辆向上方寻找停车位置时)自动在目标位置旁边停下来,从这里自动前进到后退起始位置(白色虚线)。然后开始倒车 |
|
| 图5:自动前进到了后退起始位置。从这里开始倒车,最后停在目标位置 |
|
| 图6:如果摄像头检测到行人就会自动停车 |
|
| 图7:平行停车示意图。步骤和刚才常用的停车方式一样 |
|
| 图8:如果摄像头检测到行人,就会自动停车 | (责任编辑:赵波) |
|
|